
CARIO 360 : Autonomous robot for transporting crates in warehouse
- Category: Robotics and Computer Vision
- Language: C++, ROS, Python
- Date: September 2023 - February 2024
Introduction
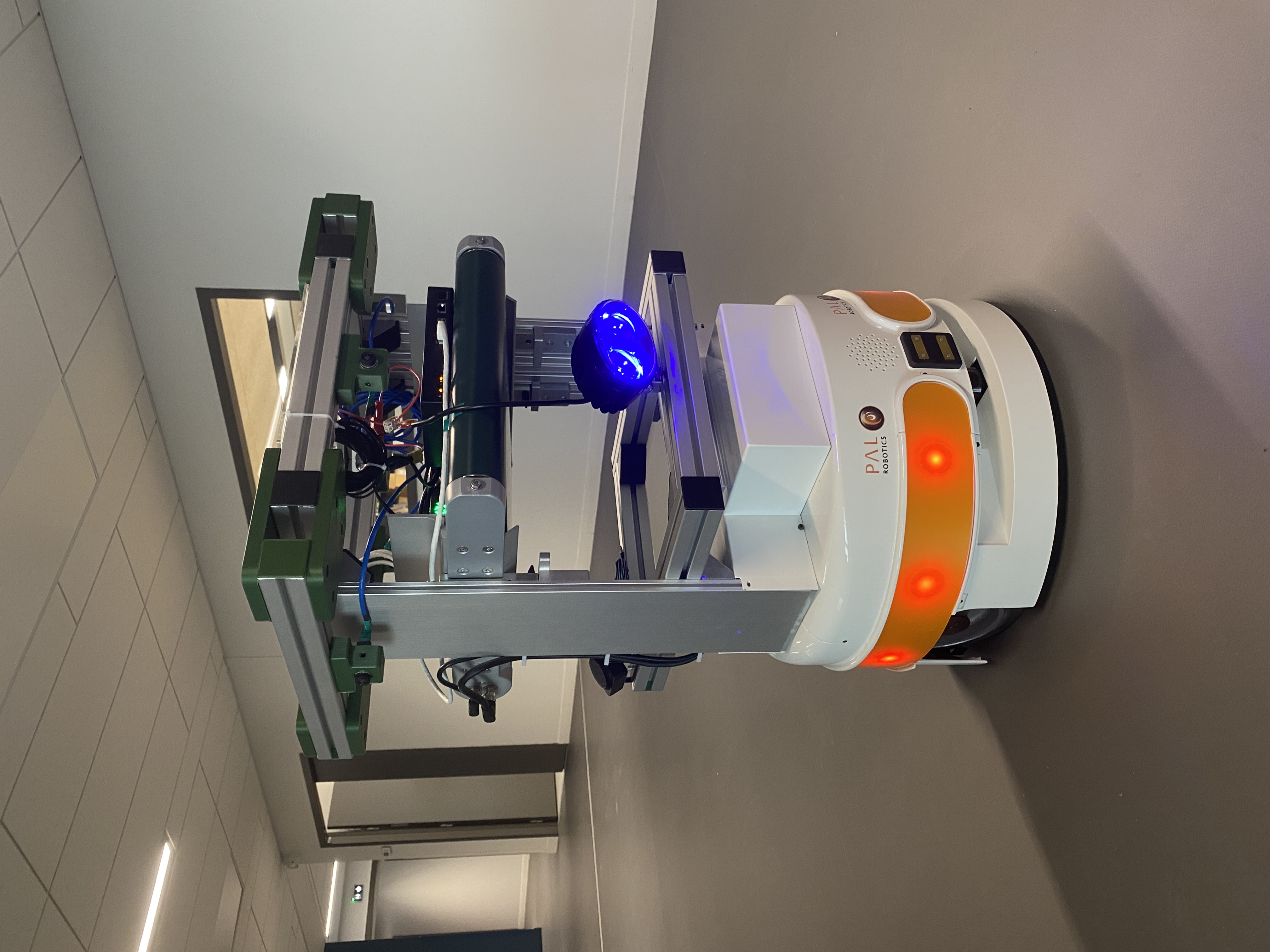
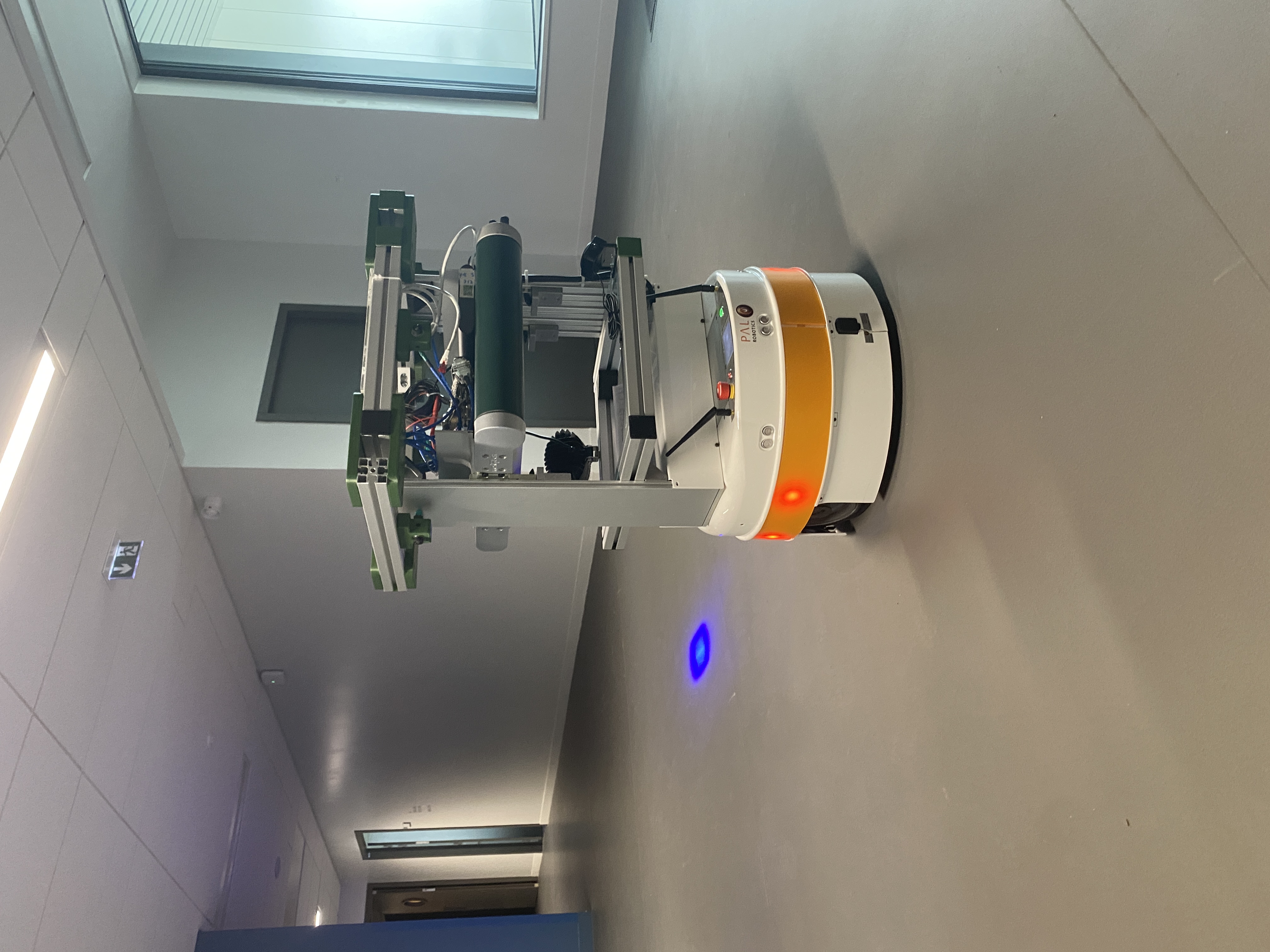
In partnership with CES-DAAD (Continental Engineering Services - Driver Assistance and Autonomous Driving), we evaluated the use of the Surround View (SV) system in a context of autonomous navigation. The objective was to create an autonomous robot capable of transporting crates within a logistics warehouse. It must be able to work with other human agents safely.
We were 17 students on this project, I was product owner and in addition, in charge of the vision development team.
What we did
The SV system is composed by 4 fish-eye cameras. We designed a platform to support the hardware (Leds, PC, SV). In term of functionality :
- Human's detection: We used Yolo to detect human around the robot
- Obstacles' detection: The robot is equiped with LIDAR detector which detect static and dynamic obstacle
- Localisation: The robot is located in a mapped environment
- Navigation: We implement D* lite and MPC to allow the robot to navigate and re calculate its trajectory if it encounters an obstacle
- HMI: We created a software to monitor actions of the robot
More details [SOON]
Find here our press release
Find here the french support for our presentation